Stoolbotics
2012
A beginner friendly, minimalistic and open source robot arm simulator I wrote in python for a robotics class back in 2012. Stoolbotics is designed to be a general purpose arm and kinematics simulator aimed at being a teaching tool for aspiring roboticists.
Home | Download | Quickstart | Docs
Linear algebra and mathematical concepts behind robotics are difficult for a beginners without any visual context. This is especially true for people who are primarily visual learners (like me). This tool will hopefully fill a gap in education environments where robotics is being taught.
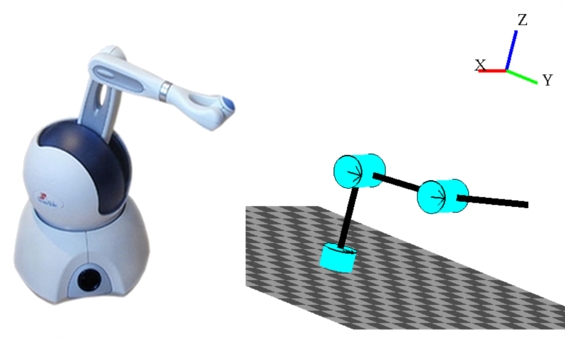
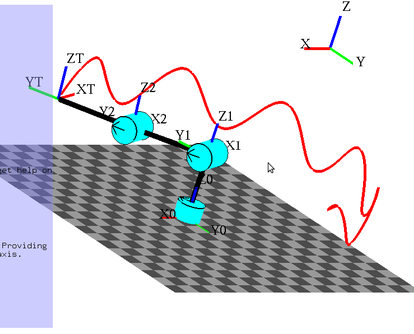
Stoolbotics (right) simulating a phantom omni (left).
Features
Stoolbotics has many features that make it attractive to the aspiring roboticist and the robotics education classroom:
- An easy to use / understand file format for specifying a robot arm
- Ability to visualize any robot that can be specified in such a file
- Compute the forward kinematics of any robot from DH parameters
- Command line interface within simulator with many useful commands
- Customizable simulation environment
- Animate and draw paths for arms
- Control time-stepping
- Change variables in the simulator on the fly
- Record / playback simulator activity
- MATLAB compatible
- Import a recording generated in MATLAB
- Able drive simulator in real time from a UDP stream (includes an example of this)
- Built in help from simulator command line and comprehensive documentation
- Cross platform implementation
Links
- How to get Stoolbotics: download page
- Source code on github
- Quickstart of how to use Stoolbotics: quickstart
- Full documentation: full docs.