FIRST Robotics
2008

Robots I helped design as part of Team 1831.
I had the great fortune of participating and captaining FIRST robotics team 1831 throughout my time at Gilford High School. Here are the robots we built while I was there in chronological order.
Aim High - (2006)
This was the first year Gilford High School had a First Robotics team. Pictured above is our rookie team's entry into the Aim High competition. It is a relatively unsophisticated beast that could pretty much get hit by a train and still work. Fundamentally, its function was to pick up, store and shoot foam balls into a goal. Sadly this was so long ago (5 years as of writing this) I don't specifically remember much of the details about it.
Rack 'n Roll - (2007)
As is evident from that video, this robot represented our team's first foray into the world of mechanum wheels. These wheels are a variation on a theme of omni wheels that let the robot move in any direction unconstrained. For the next two years, I would help design mechanum drive trains for our team (CAD mostly). While really cool, our teams obsession over these wheels would cause us to lose sight of the arm attachment that would need to perform the robot's function of removing tubes from the rack for 2007's Rack 'n Roll competition.
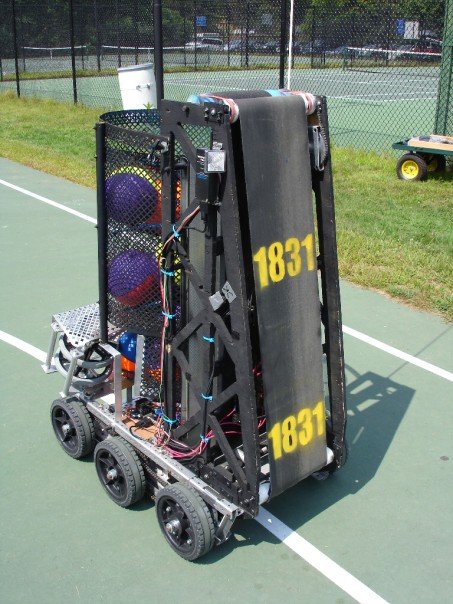
Overdrive - (2008)

This was basically the 2007 design, part two. The competition was Overdrive, which was essentially a race with large balls in the track that accumulate points as you corral them around. You could also just drive around for points. As captain, I wanted to steer the team in the direction of "do one thing and do it well" and essentially wanted to design a dragster type robot. However, part of working as a team is accepting other people's ideas even when you don't necessarily agree with them.
The team went with mechanum wheels, and again we lost sight of what we were originally trying to do (heard the ball) and probably could have made a better robot. Still, I tried to make the best of it and designed a completely modular chassis for the wheels. I made one standard "box" design that self-contained a speed controller, the wheel, bearings, pillow blocks, etc. Four of these boxes were then bolted together to make a robot. This saved design time, simplified troubleshooting and made it a breeze to replace parts.
Another interesting side effect of the box wheel module design -- I learned how to properly weld aluminum (there were a TON of joints), which is quite tricky (but fun!).
All in all our team had really perfected the mechanum drive train, so it was not a total loss. We drove around that track like a boss. Also, this particular year I did not do any nordic skiing for the school team (which I usually did), so I contributed much of the programming and electrical system on top of the CAD and machining for the drive train.
Future - (????)

Something awesome about FIRST is the role of mentors. They aren't there to design or build things for you, but to be a resource that can enable, advise and empower students to accomplish and learn amazing things. At some point in my life, I'd really like to be a FIRST mentor so that I can get a taste of what this is like and inspire the next generation of young roboticists just like the mentors at Gilford inspired me.